Get In Touch
Get in touch with us for any questions or quotes on surveying services and products. We will respond back as soon as we can.
Zupt offers cutting-edge services and products for accurate subsea navigation, positioning, and high-resolution modeling. Our offerings include innovative solutions to optimize efficiency and accuracy in various subsea operations. Zupt has an extensive track record of purely inertial metrology surveys for jumper/spool fabrication between subsea assets, as well as remote metrology surveys for hassle-free deployment with no additional personnel mobilized offshore. Our 3D modeling service delivers scalable, high-resolution models for asset integrity, digital-twin generation, and metrology. Explore our range of subsea services and our advanced technologies, such as Zupt's inertial navigation system (C-PINS), 3D modeling sensor (3D Recon), and contactless positioning system (HaloCAM).
Praesent turpis mi, fermentum at sapien vel, cursus tincidunt diam. Sed blandit egestas dolor, in commodo dui. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Mauris mi nibh, congue in magna rutrum, dapibus iaculis eros. Maecenas iaculis tellus at quam pellentesque interdum. Etiam ac varius erat, vel egestas purus.
Praesent turpis mi, fermentum at sapien vel, cursus tincidunt diam. Sed blandit egestas dolor, in commodo dui. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Mauris mi nibh, congue in magna rutrum, dapibus iaculis eros. Maecenas iaculis tellus at quam pellentesque interdum. Etiam ac varius erat, vel egestas purus.

Inertial Metrology using Zupt's C-PINS is a proven and efficient method to accurately determine the measurements required for jumper or spool fabrication between subsea assets. Over the past 16 years, Zupt has completed more than 400 inertial metrologies, which have proven to be more efficient than traditional LBL acoustic metrology methods, consistently saving an average of 50% vessel time. This efficiency translates to significant cost savings and enhanced productivity for offshore marine construction projects worldwide.
Zupt's inertial navigation system, C-PINS, has several advantages, one of which is its simple and efficient design. The system is self-contained and needs only one subsea connection to the ROV for both power and communication, making it simple to connect and communicate on any vessel, rig, or barge equipped with a work-class ROV. This reduction in setup time allows our survey team to immediately get to work, without the delays associated with complicated interfacing.
In terms of accuracy, Zupt's inertial metrology solution consistently delivers precise measurements required for jumper or spool fabrication. The data obtained by C-PINS is comparable to that acquired through traditional LBL acoustic metrology methods but with a significant speed advantage. It saves valuable vessel time by eliminating the need for an acoustic array and operates effectively in shallow water or in the presence of drilling noise and vibration.
Another significant benefit offered by Zupt's inertial metrology is real-time quality control. Clients can confidently make decisions during survey operations with precise assessments available in millimeters or fractions of a degree throughout the data collection process in real-time. The final deliverable is provided within 24 hours after data collection, minimizing project downtime, and contains all metrology data required for jumper or spool fabrication.
Inertial Metrology offers a proven, efficient, and accurate solution for determining measurements crucial to subsea jumper/spool fabrication. By maximizing productivity, minimizing project timelines, and reducing operational costs, Zupt's inertial metrology enables faster, cost-effective project completion.
Contact Zupt today to learn more about inertial metrology services and how they can enhance your offshore operations.

Zupt began offshore trials in 2017 to implement remote metrology surveys using its C-PINS inertial navigation system. As drillships started conducting more jumper and spool metrologies, there were concerns about managing personnel on board, equipment logistics, and ensuring equipment readiness. Therefore, the shift towards remote metrology operations without deploying additional personnel to field sites was seen as a way to enhance efficiency and safety, with the bonus of reduced environmental impact. Zupt has had 100% success with 30+ remote surveys, and there have been no emergency offshore mobilizations to rectify operational downtime. This success translates into cost savings for clients, as Zupt's lumpsum remote metrology pricing model ensures predictable expenses.
The remote metrology procedure involves a few simple steps. Upon equipment arrival offshore, ROV personnel verify the packing case count against the manifest. The equipment is brought to the ROV deck days before the metrology operation for full system integration, ensuring reliable ROV and onshore communication. The day before the metrology, the ROV team gathers the CTD profile, assembles the C-PINS into lifting hardware, and attaches the stab. On the metrology day, the ROV team brings the system online. They check communications with Houston for ROV video, serial data (over ethernet), voice/phone, and data acquisition begins as if our personnel were sitting in the ROV control room with the pilots.
With offshore equipment interfacing handled by the ROV team, the onshore survey team can promptly initiate fabrication deliverables upon completion of the data acquisition with a deliverable to the client within 24 hours. Additionally, the known upfront cost of the metrology allows flexibility in the project schedule without being constrained by reducing day rates before and after the job.
The advancement of technology is rapidly improving bandwidth availability and affordability, particularly with emerging satellite communication solutions such as Starlink, which signifies a positive trajectory for remote metrology services and enhances accessibility and reliability for clients.
Contact Zupt today to learn more about remote metrology services and how they can enhance your offshore operations.


Sparse LBL is a precise subsea positing technique that couples LBL with INS technology for efficient subsea navigation. With over a decade of experience integrating INS with aiding sensors, our Sparse LBL service saves time from deploying and calibrating a full LBL array at each subsea worksite. With the same precision as LBL arrays in half the time, Sparse LBL provides higher value to your high accuracy seafloor survey operations.
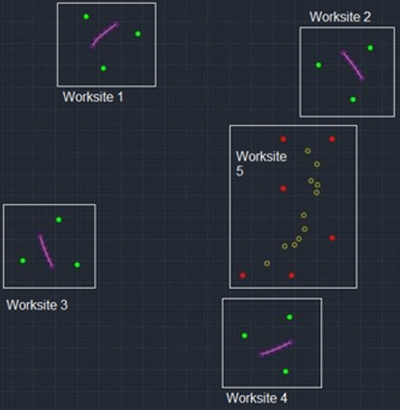
Array planning for optimizing the number of transponders deployed and calibrated on the seafloor. Zupt’s offshore surveyors and engineers offer their expertise for initial LBL array design or for a second opinion. Optimizing the acoustic array for small or large projects will not only reduce the number of assets on the seabed, but also the operational time required to deploy and calibrate the LBL array.
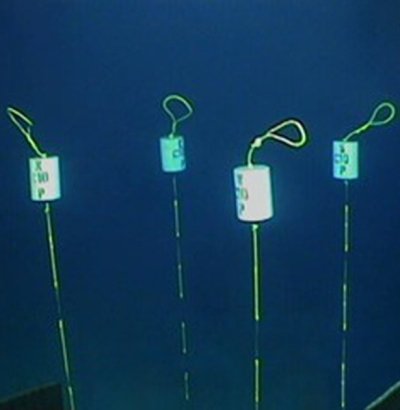
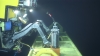
Zupt’s highly accurate Inertial Navigation System (C-PINS) and specialized buoy setting tool reduces the amount of time required to position a buoy pattern on the seabed prior to spudding a new well, placing a new subsea structure, or installing a monopile. Our methodology requires that the ROV team positions a single tool to provide precise locations for the four corner marker buoys to be placed. The tool is easily removed without disrupting the buoy markers and has a convenient, easy-to-access C-PINS receptacle.

3D Recon V2 is a subsea stereo imaging system that produces high-resolution, geospatially accurate 3D models of what is seen subsea. Housed in a compact subsea enclosure rated for depths up to 4,000 meters, it features two high-resolution machine vision cameras and a high-performance MEMS IMU. By integrating inertial technology with imaging sensors, 3D Recon V2 can generate real-time sparse point clouds for navigation and quality control, as well as high-density 3D models that help engineers make informed decisions about the integrity of their subsea assets.
While 3D Recon V2 was initially developed for Integrity Management (IM) and Inspection, Repair, and Maintenance (IRM) purposes. Its versatility has since led to adoption in a range of other applications, including::
3D Recon V2 leverages the ‘3D reconstruction’ methodology, advanced computer vision, and inertial navigation techniques to generate camera poses, point clouds, object detection, and pose estimation of underwater objects. It supports both real-time and highly optimized offline dense point cloud generation. Here's how each pipeline works:
Real-Time Dense Point Cloud:
Offline Dense Point Cloud:
Real-Time Detection and Pose Estimation of Underwater Objects:
3D Recon V2 delivers high-resolution, geospatially accurate 3D models with submillimeter pixel resolution. These precise models support the subsea integrity community in making informed decisions about structural health over time. 3D Recon V2 integrates seamlessly into existing workflows, providing high-resolution still images, conventional video, and 3D models generated both in real time for verification and offline for detailed inspection.
We require a survey mux to integrate the 3D Recon V2 spread. All power, serial communications, and image data are connected to the Mux/ROV through a single PBOF cable. It relies on one RS232 and one GB Ethernet port for configuration and data transmission. Power requirements are 24Vdc at 150W.
Contact Zupt today to learn more about 3D Recon and how it can enhance your subsea operations.

HaloCAM is a subsea imaging sensor that monitors the verticality, heading, and relative position of any structure that has an April Tag adhered to it. Derived from the Halo INS, HaloCAM combines a high-definition machine vision camera with a navigation grade INS. HaloCAM mobilizes to the ROV with no dimensional control required for fixed offsets from the camera to an external INS.

Halo is a compact, easy to integrate, and affordable INS solution for ROV navigation and positioning. Halo is offered in two heading accuracy configurations: An “Affordable” <0.3° secant lat. heading accuracy INS or a “Precise” <0.1° secant lat. heading accuracy INS. Both Halo configurations are rated for use in water depths up to 4,000 meters and can tightly integrate various positioning solutions (USBL, DVL, LBL, Depth, etc.) as a complete subsea INS solution.

Fusion-Splice allows real-time, direct interfacing of Sonardyne LBL ranges into an iXBlue Inertial Navigation System for Sparse LBL operations without a complete spread of equipment from a single manufacturer. Fusion Splice allows you to work with the equipment you already have by communicating between acoustic and inertial systems to save time and resources performing Sparse LBL operations.

MicroTTU is a flexible, multi-port, and precisely timed subsea serial multiplexor designed to withstand the harsh environment of ROV operations. MicroTTU uses a single ROV serial channel to add six channels or ports for additional communication capability to any ROV, AUV, or Towfish. All sensor data is appended with a precise time tag or exported to either a virtual or real serial port in the same form as the original sensor data. Also, a data logging option is supplied within the surface software for individual channel logging to separate files.