









Get In Touch
Get in touch with us for any questions or quotes on surveying services and products. We will respond back as soon as we can.
Inertial Metrology using Zupt's C-PINS is a proven and efficient method to accurately determine the measurements required for jumper or spool fabrication between subsea assets.
Zupt began offshore trials in 2017 to implement remote metrology surveys using its C-PINS inertial navigation system.
Accurate and Efficient Subsea Surveying with 3D Modeling Zupt’s 3D Modeling service provides a precise and efficient way to capture, measure, and visualize subsea assets.Using advanced 3D reconstruction methods, it produces high-resolution point clouds and mesh models that enable engineers to perform accurate measurements, support digital twin generation, and streamline inspection and metrology workflows. This technology allows operators to view subsea assets in true scale and detail, helping reduce uncertainty and simplify offshore decision making.
Sparse LBL is a precise subsea positing technique that couples LBL with INS technology for efficient subsea navigation.
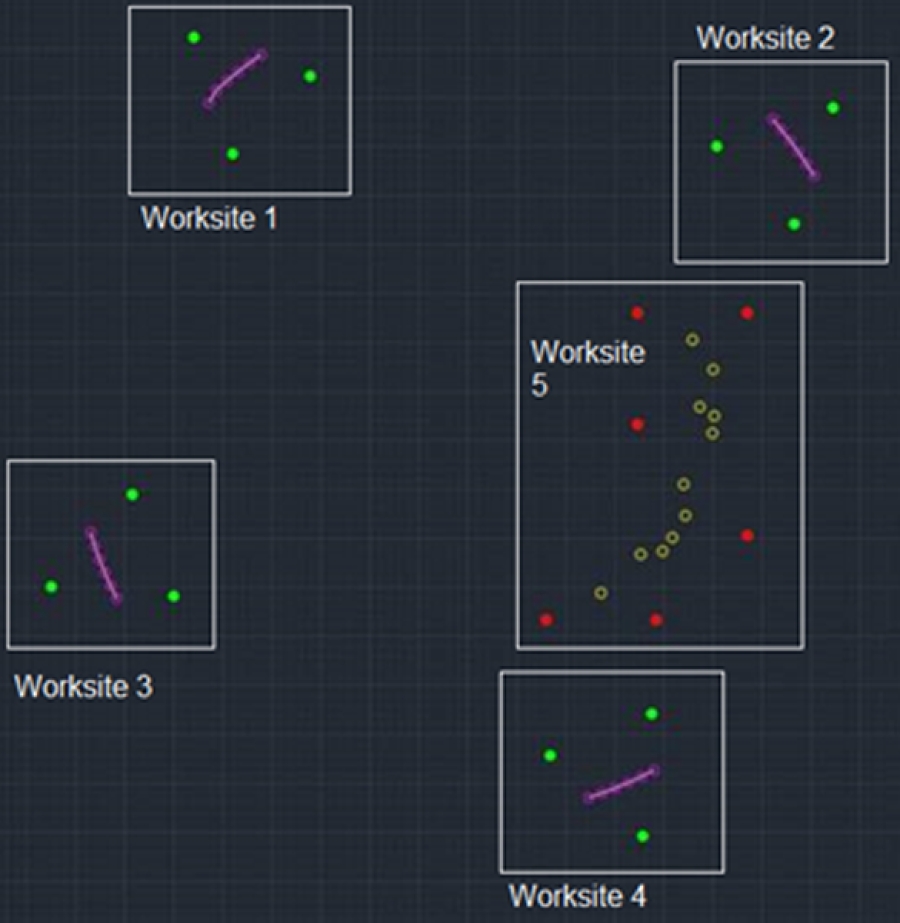
Array planning for optimizing the number of transponders deployed and calibrated on the seafloor.
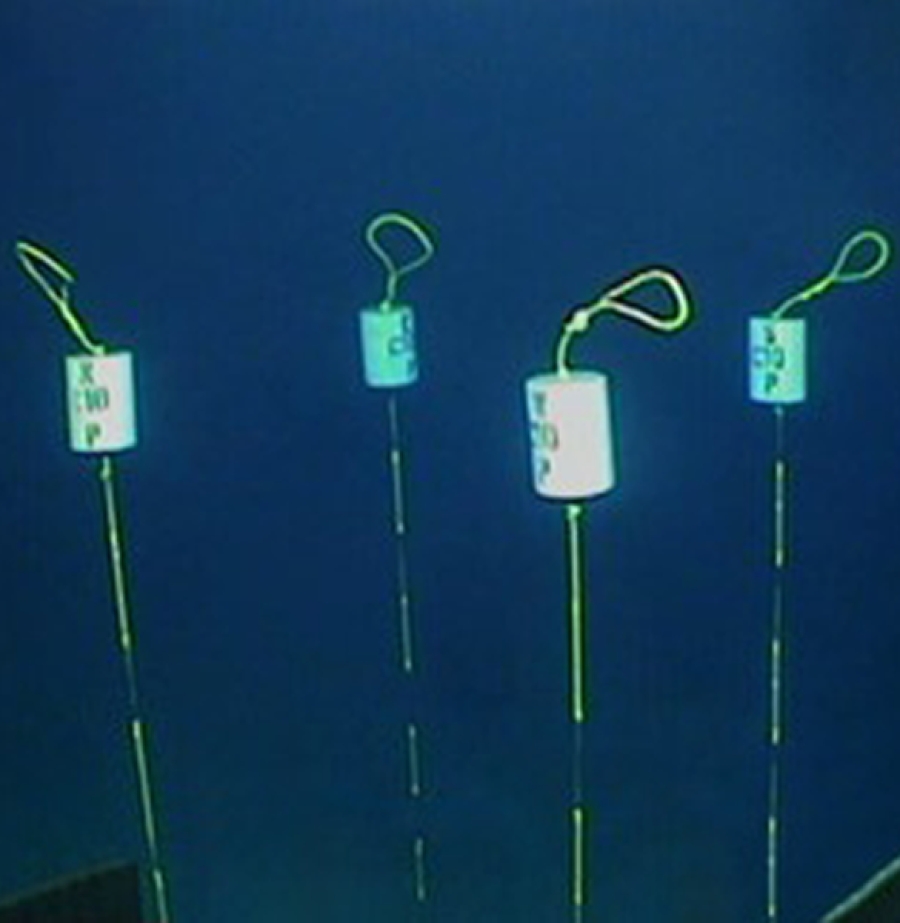
Zupt’s highly accurate Inertial Navigation System (C-PINS) and specialized buoy setting tool reduces the amount of time required to position a buoy pattern on the seabed prior to spudding a new well, placing a new subsea structure, or installing a monopile.
3D Recon V2 is a subsea stereo imaging system that produces high-resolution, geospatially accurate 3D models of what is seen subsea.
C-PINS is Zupt’s proven inertial navigation system that delivers the precise measurements needed for subsea jumper and spool metrology.
HaloCAM is a compact, 4000-meter rated sensor that delivers precise pitch, roll, heading, depth, and position for subsea structures during installation.
Halo is a compact, easy to integrate, and affordable INS solution for ROV navigation and positioning.
Fusion-Splice is a cutting-edge solution that bridges acoustic and inertial navigation systems for marine survey operations.
The microTTU is a compact subsea serial multiplexor that turns one ROV serial channel into six additional channels for added comms on ROV, AUV, or towfish operations.